
Hao Cheng (程淏) / Eric Cheng
Email: h-cheng@stu.pku.edu.cn (during Ph.D.) hc.robotic@gmail.com (long-term)
Education
College of Engineering, Peking University 09/2021 - present
Beijing, China
Ph.D. candidate in Mechanics
Department of Automation, Tsinghua University 09/2018 - 08/2021
Beijing/Shenzhen, China
M.E. in Control Engineering
New Energy School, North China Electric Power University 08/2013 - 06/2017
Beijing, China
B.E. in Wind Power (Outstanding Graduate at Beijing)
Wrocław University of Science and Technology 02/2017 - 06/2017
Wrocław, Poland
Visiting Student
Research Experience
College of Engineering, Peking University 09/2021 - present
Beijing, China
Advisor: Prof. Feitian Zhang
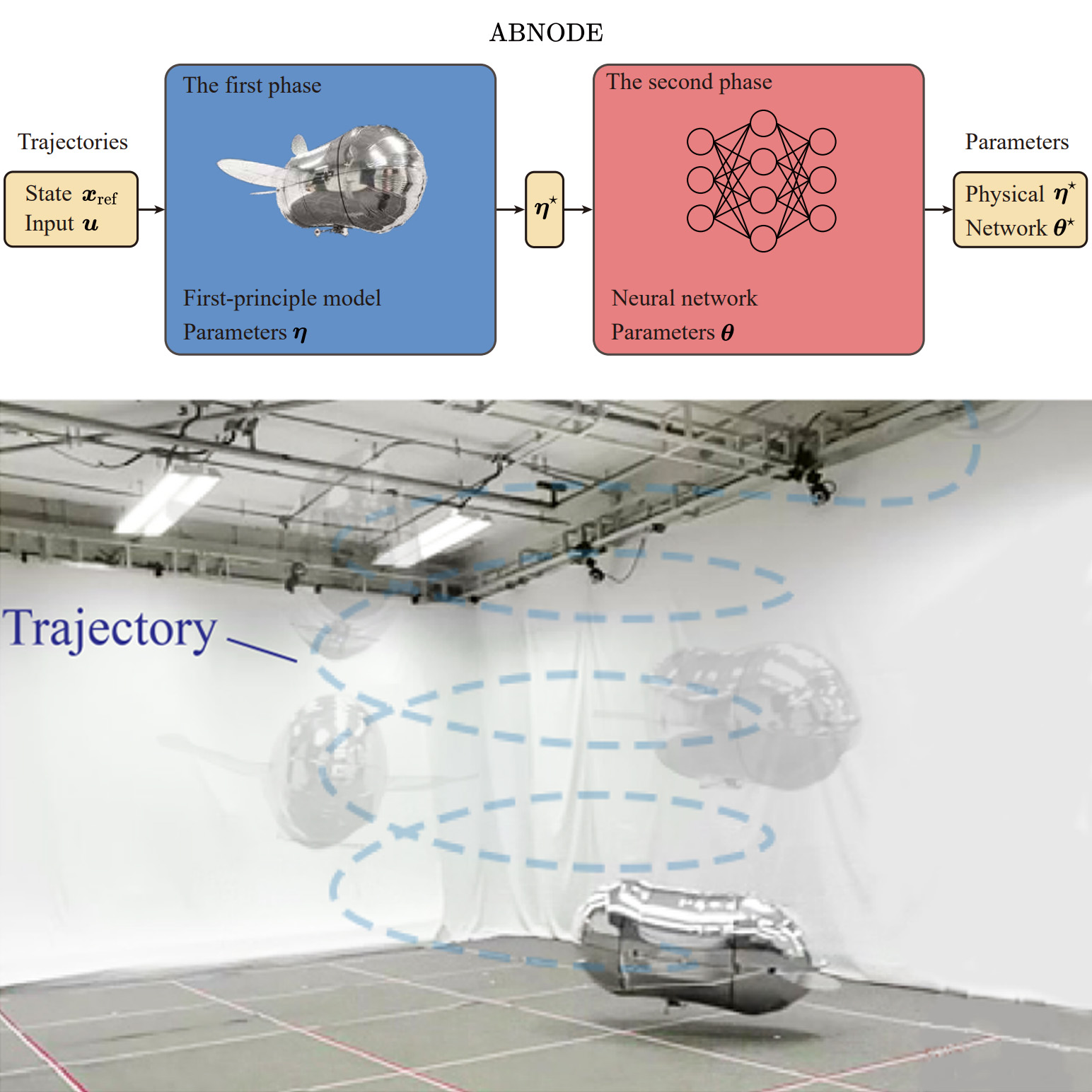
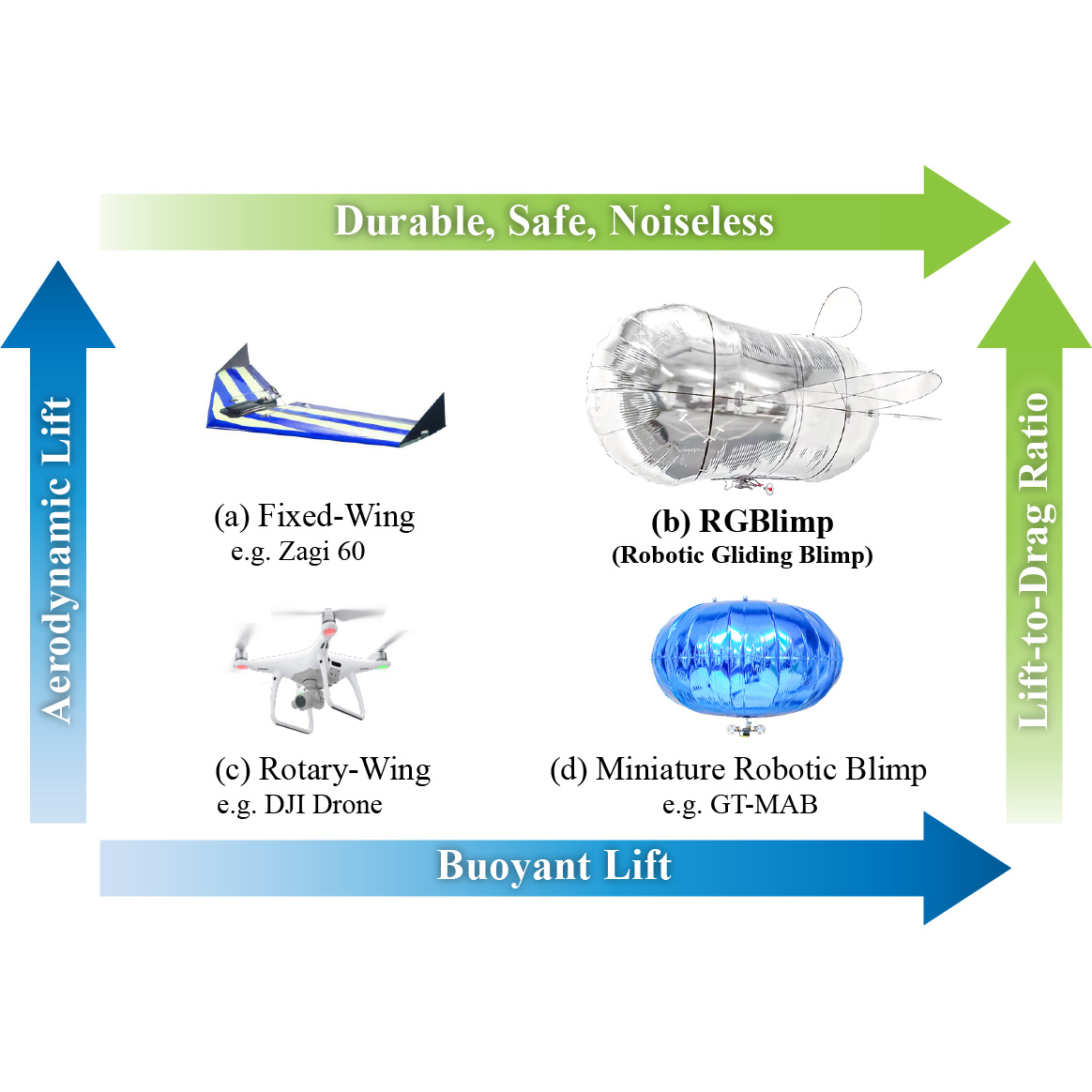
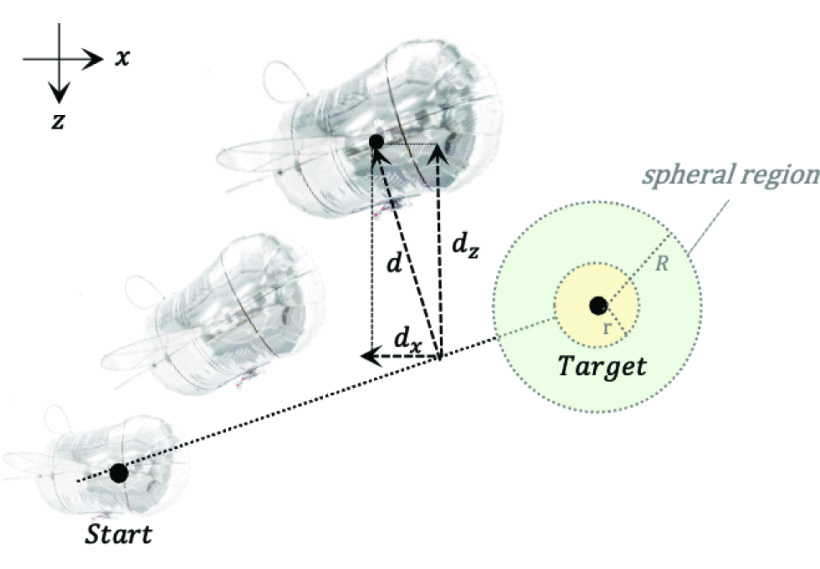
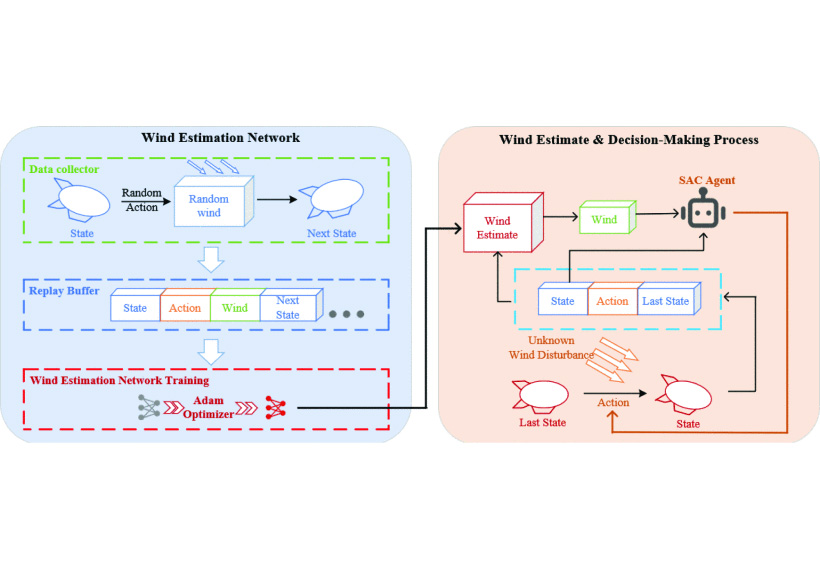
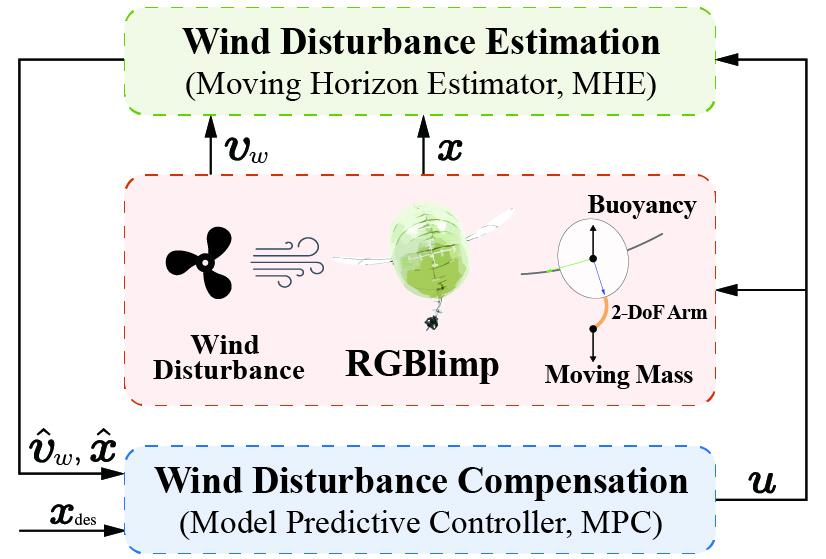
Topic: Lighter-than-Air Aerial Robots, Bionic Flying Robots, Aerial Manipulation
Shenzhen International Graduate School, Tsinghua University 09/2018 - 08/2021
Shenzhen, China
Advisor: Prof. Houde Liu, Prof. Xueqian Wang
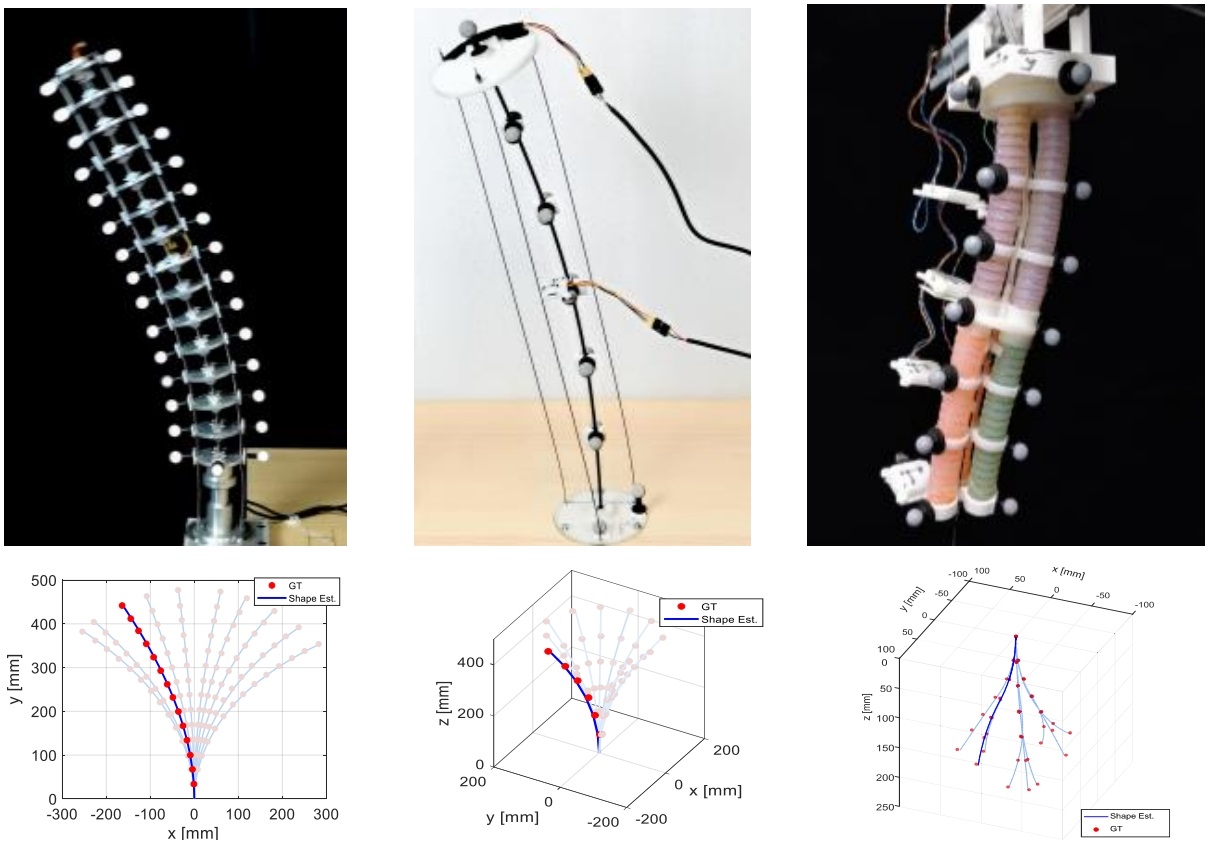
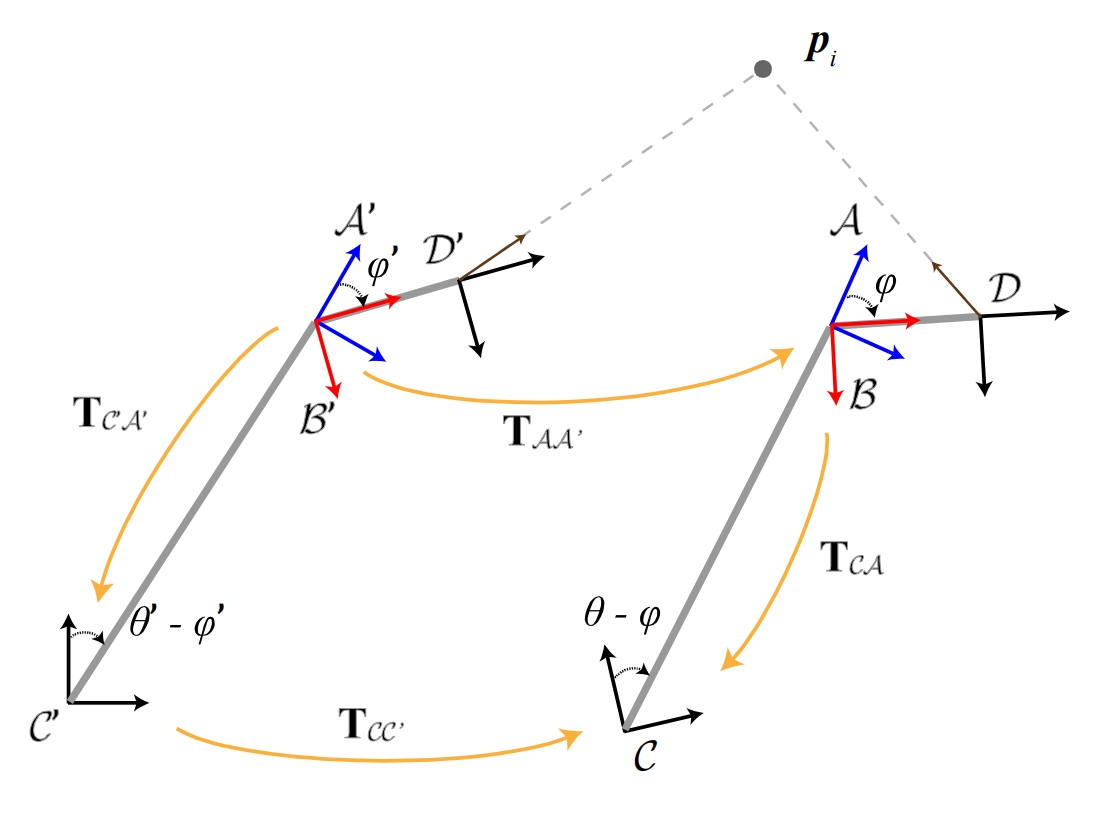
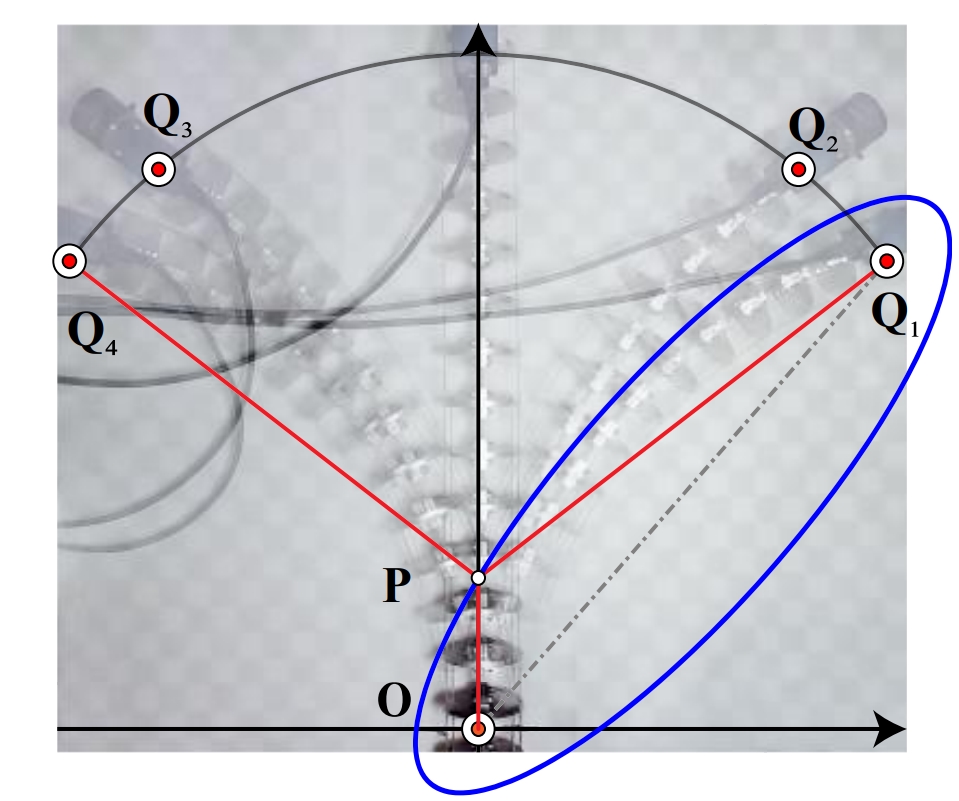
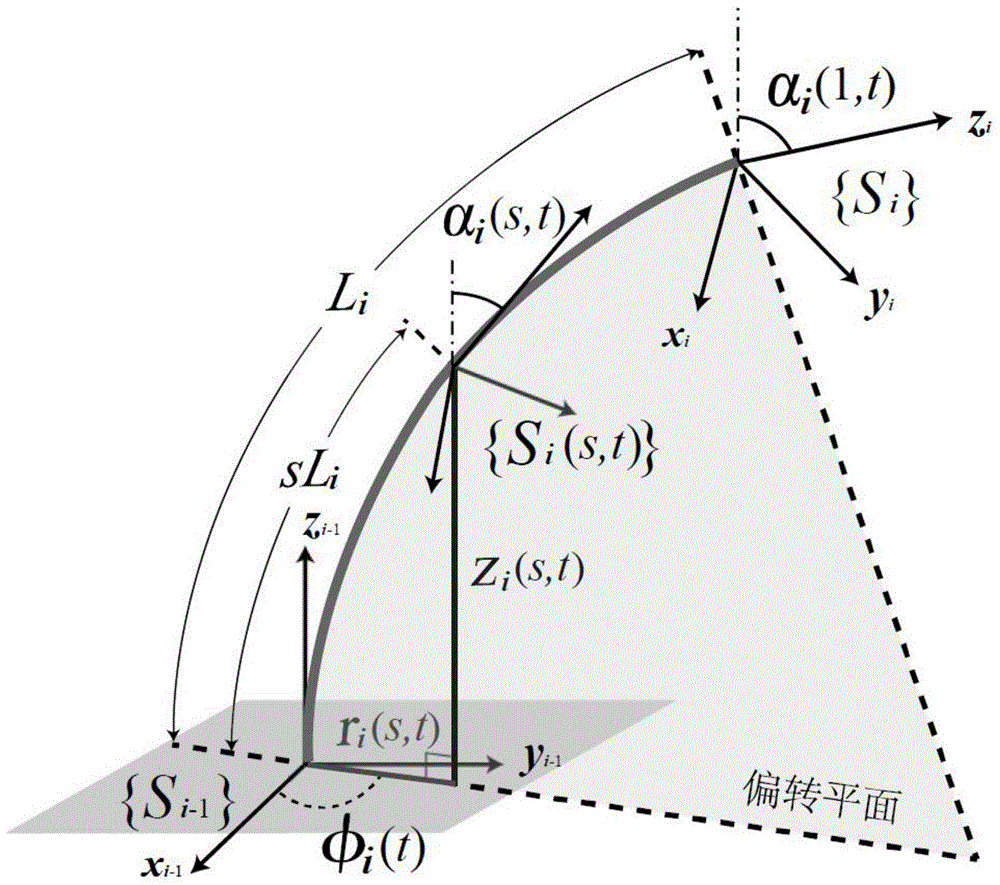
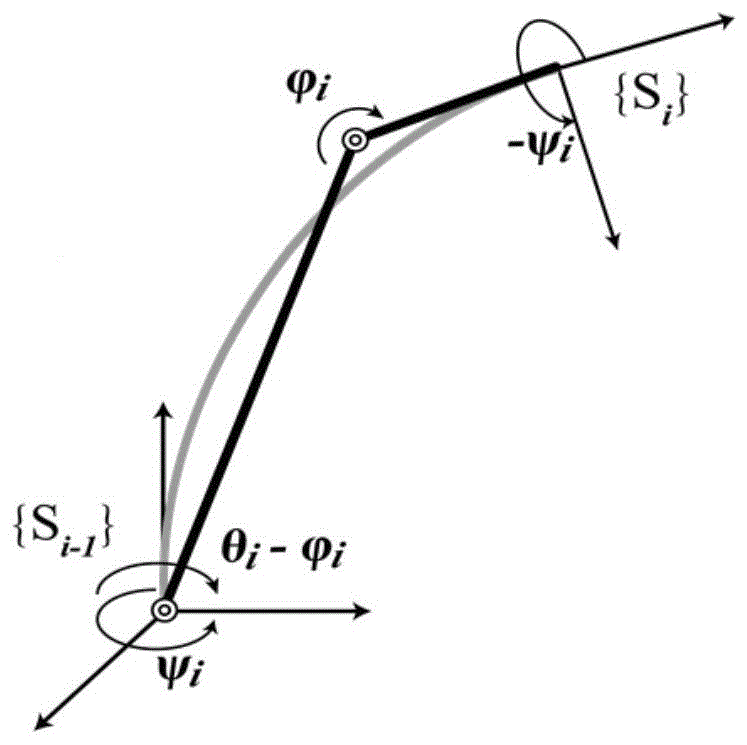
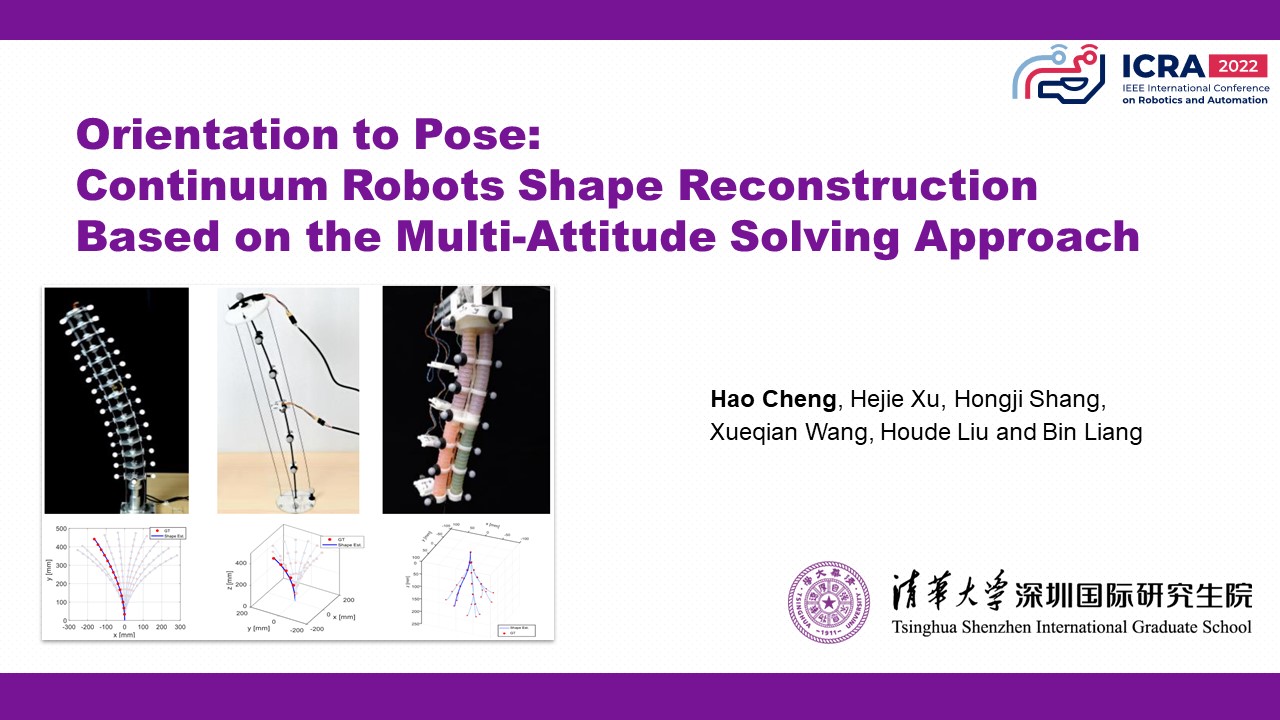
Topic: Perception and Control for Continuum and Soft Robots
Publications
Journal Articles

Conference Papers
Under Review
Patents
{kind=link}
{kind=link}
Awards & Honors
- National Scholarship (Doctoral), China, 2025
- Exceptional Award for Academic Innovation, Peking University, 2025
- Outstanding Research Award, Peking University, 2022
- Comprehensive Excellence Scholarship, Tsinghua University, 2020
- Outstanding Graduate at Beijing, China, 2017
- National Scholarship, China, 2015
- National Encouragement Scholarship, China, 2014 and 2016
- First-Class Scholarship, North China Electric Power University, 2014, 2015, and 2016
Competitions
- 1st Prize, Inclusive Design Comp. (lead, suitcase for visually impaired), 2025
- 2nd Prize, Graduate Future Flight Vehicle Design Comp. (lead, robotic gliding blimp), 2024
- 2nd Prize, Graduate Robotics Design Comp. (lead, spinal rehab robot), 2021 [Project]
- 2nd Place, ZC-Cup Frontier Tech. Challenge (contribution in Maze Nav), 2020 [Project]
- 1st Prize, Capital Mechanical Innovation Design Comp. (lead, packaging robot), 2016
- 1st Prize, China Siemens-Cup Intelligent Manufacturing Challenge, 2016
- Champion, Robots Comp. of Universities at Beijing (lead, robot combat), 2015 [Project]
- 2nd Prize, Beijing Eng. Ability Compet. (lead, Bluetooth cargo robot), 2015 [Project]
- 2nd Prize, LQ-Cup C/C++ Programming Comp. (individual), 2015
- 2nd Prize, National Olympiad in Informatics in Provinces (NOIP, individual, C++), 2012
Academic Service
- Reviewer for IEEE T-RO, ICRA, IROS, CDC, ACC, and IEEE/ASME AIM